基于物理的元字宙合成进行视觉驱动的机器人抓取的大规模基准图像数据集
数据说明:
人们对利用机器人系统解决重复性、繁重任务的智能工厂越来越感兴趣。在机器人驱动的智能制造工厂应用中,一个特别具有影响力但具有挑战性的任务是机器人抓取:使用机械臂在不同环境中自主抓取物体。
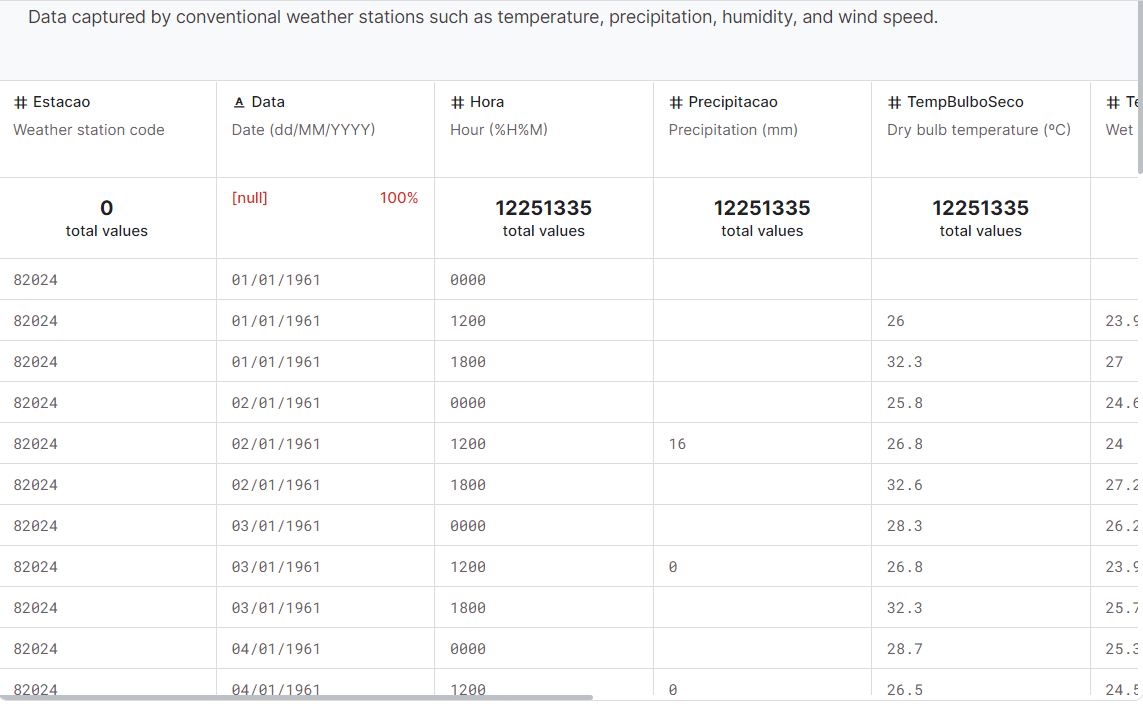
机器人抓取需要多种计算机视觉任务,如物体检测、分割、抓取预测、抓取规划等。虽然在利用机器学习进行机器人抓取方面取得了显著进展,特别是通过深度学习,但仍然需要大规模、高质量的RGBD数据集,涵盖广泛的场景和排列,这是一个巨大的挑战。
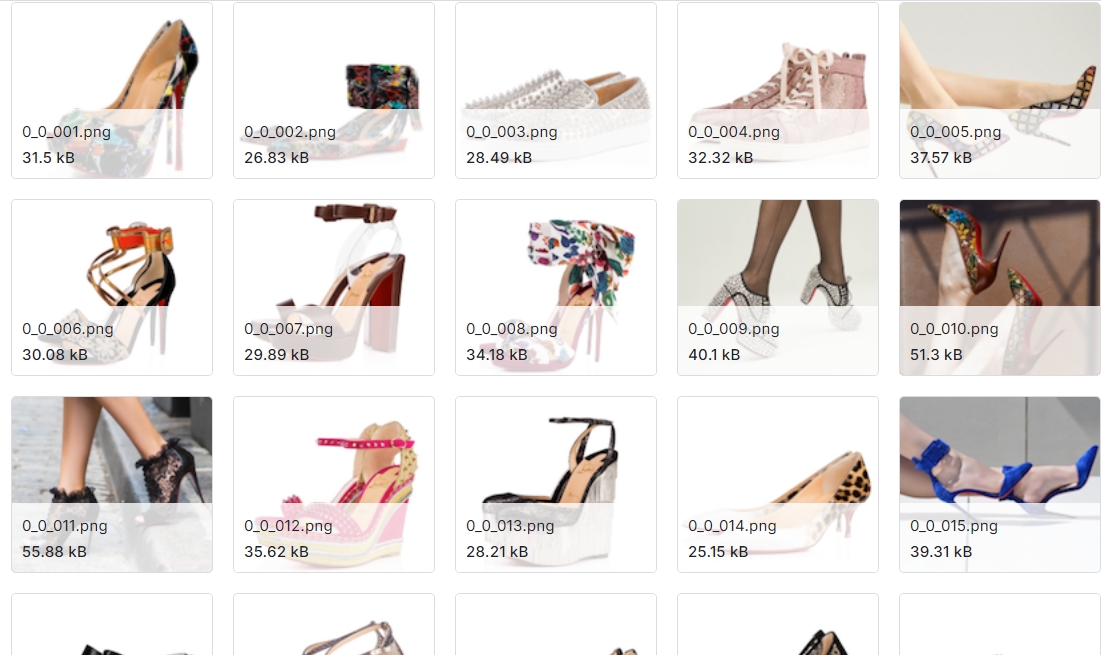
该数据集是一个通过基干物理的虚拟世界合成进行视觉驱动的机器人抓取的大规模基准数据集。拟议的数据集包含100.000张图像和25种不同的物体类型,并分为5种难度,以评估在不同抓取场景下的物体检测和分割模型性能。并且提出了一种新的布局加权性能指标,以及数据集,用干以更适合机器人抓取应用的方式评估物体检测和分割性能。